Mecanismes i màquines
| Website: | Cursos IOC - Batxillerat |
| Kurs: | Tecnologia industrial I (Bloc 2) ~ gener 2020 |
| Buch: | Mecanismes i màquines |
| Gedruckt von: | Visiteur anonyme |
| Datum: | Dienstag, 28. Mai 2024, 04:05 |
1. Mecanismes i màquines
- Sabem què és un mecanisme?
- És el mateix que una màquina?
 |
Un mecanisme és un conjunt d'elements connectats entre si per mitjà d'articulacions mòbils amb la missió: transformar una velocitat en una altra, una força en una altra, una energia en una altra forma d'energia o modificar una trajectòria.
 |
Figura: Mecanisme |
 |
Figura: Màquina |
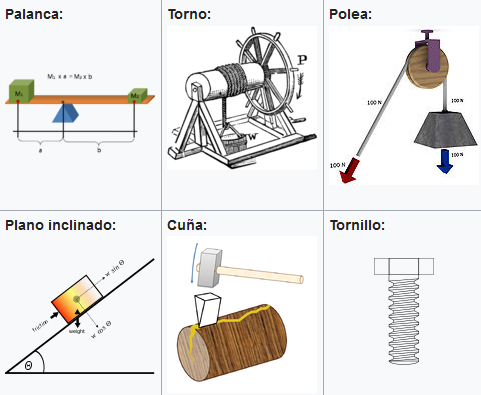
Els grans filòsofs de l'antiguitat anomenaven a les màquines simples "les cinc grans".
2. Magnituds bàsiques
En aquest punt farem un petit repàs de les magnituds que utilitzarem en aquesta unitat, així com de les expressions amb què les calcularem i de les seves magnituds.
Ens centrarem en els conceptes que necessitem, obviant definicions més genèriques. Així per exemple, el primer que anem a repassar és el concepte de velocitat angular, però no començarem recordant que velocitat és l'espai (lineal o angular) recorregut per unitat de temps.
Velocitat angular (ω)
La seva unitat de mesura en el Sistema Internacional és radiants/segon, rad/s.
En les aplicacions pràctiques (per exemple per determinar les velocitat del motor d'un cotxe) s'expressa en revolucions per minut, rpm, i en aquest cas s'utilitza la lletra n per identificar-la.
La relació entre ambdues és:
format('truetype')%3Bfont-weight%3Anormal%3Bfont-style%3Anormal%3B%7D%3C%2Fstyle%3E%3C%2Fdefs%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%226.5%22%20y%3D%2227%22%3E%26%23x3C9%3B%3C%2Ftext%3E%3Ctext%20font-family%3D%22math1f1a7633c56d3ad5746e24f7b85%22%20font-size%3D%2216%22%20text-anchor%3D%22middle%22%20x%3D%2221.5%22%20y%3D%2227%22%3E%3D%3C%2Ftext%3E%3Cline%20stroke%3D%22%23000000%22%20stroke-linecap%3D%22square%22%20stroke-width%3D%221%22%20x1%3D%2232.5%22%20x2%3D%2283.5%22%20y1%3D%2221.5%22%20y2%3D%2221.5%22%2F%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%2238.5%22%20y%3D%2216%22%3En%3C%2Ftext%3E%3Ctext%20font-family%3D%22math1f1a7633c56d3ad5746e24f7b85%22%20font-size%3D%2216%22%20text-anchor%3D%22middle%22%20x%3D%2248.5%22%20y%3D%2216%22%3E%26%23xB7%3B%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20text-anchor%3D%22middle%22%20x%3D%2256.5%22%20y%3D%2216%22%3E2%3C%2Ftext%3E%3Ctext%20font-family%3D%22math1f1a7633c56d3ad5746e24f7b85%22%20font-size%3D%2216%22%20text-anchor%3D%22middle%22%20x%3D%2265.5%22%20y%3D%2216%22%3E%26%23xB7%3B%3C%2Ftext%3E%3Ctext%20font-family%3D%22math1f1a7633c56d3ad5746e24f7b85%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%2275.5%22%20y%3D%2216%22%3E%26%23x3C0%3B%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20text-anchor%3D%22middle%22%20x%3D%2258.5%22%20y%3D%2238%22%3E60%3C%2Ftext%3E%3Ctext%20font-family%3D%22math1f1a7633c56d3ad5746e24f7b85%22%20font-size%3D%2216%22%20text-anchor%3D%22middle%22%20x%3D%2292.5%22%20y%3D%2227%22%3E%26%23xA0%3B%26%23xA0%3B%3C%2Ftext%3E%3C%2Fsvg%3E) |
|
format('truetype')%3Bfont-weight%3Anormal%3Bfont-style%3Anormal%3B%7D%3C%2Fstyle%3E%3C%2Fdefs%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%224.5%22%20y%3D%2227%22%3En%3C%2Ftext%3E%3Ctext%20font-family%3D%22math1f1a7633c56d3ad5746e24f7b85%22%20font-size%3D%2216%22%20text-anchor%3D%22middle%22%20x%3D%2218.5%22%20y%3D%2227%22%3E%3D%3C%2Ftext%3E%3Cline%20stroke%3D%22%23000000%22%20stroke-linecap%3D%22square%22%20stroke-width%3D%221%22%20x1%3D%2229.5%22%20x2%3D%2271.5%22%20y1%3D%2221.5%22%20y2%3D%2221.5%22%2F%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20text-anchor%3D%22middle%22%20x%3D%2240.5%22%20y%3D%2216%22%3E60%3C%2Ftext%3E%3Ctext%20font-family%3D%22math1f1a7633c56d3ad5746e24f7b85%22%20font-size%3D%2216%22%20text-anchor%3D%22middle%22%20x%3D%2253.5%22%20y%3D%2216%22%3E%26%23xB7%3B%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%2263.5%22%20y%3D%2216%22%3E%26%23x3C9%3B%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20text-anchor%3D%22middle%22%20x%3D%2244.5%22%20y%3D%2239%22%3E2%3C%2Ftext%3E%3Ctext%20font-family%3D%22math1f1a7633c56d3ad5746e24f7b85%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%2255.5%22%20y%3D%2239%22%3E%26%23x3C0%3B%3C%2Ftext%3E%3C%2Fsvg%3E)
Velocitat tangencial (v)
Per calcular la velocitat angular d'un element que gira, per exemple, la velocitat d'un punt de la perifèria d'una roda o d'un eix, s'ha d'aplicar la fórmula:
v = ω · r
On la velocitat lineal, v, s'expressa en m/s, quan:
- la velocitat angular s'expressa en rad/s
- i el radi en m.
Força (F): Força és la causa que produeix moviment, modifica un moviment existent o deforma un sòlid.
L'expressió algebraica que ens determina el valor d'una força és:
- La seva unitat en el SI és el newton, N
- Encara que també s'empra com a unitat el quilopond, kp, que és la força amb què la terra atrau una massa d'1 kg
- 1kp = 9,8 N
Moment d'una força o parell d'una força (M)
El moment d'una força respecte a un punt és el producte de la força per la mínima distància entre el punt i la trajectòria de la força.
La seva expressió algebraica és:
La unitat en el SI és el Newton metre, Nm
Treball (W)
El treball realitzat per un cos és el producte de la força exercida per la distància recorreguda.
La seva expressió matemàtica és:
La seva unitat és el Joule, J, sent el seu equivalència (1 joule = 1 Newton · 1 metre)
Potència (P)
La potència és el treball realitzat a la unitat de temps.
La seva expressió és: format('truetype')%3Bfont-weight%3Anormal%3Bfont-style%3Anormal%3B%7D%3C%2Fstyle%3E%3C%2Fdefs%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%225.5%22%20y%3D%2226%22%3EP%3C%2Ftext%3E%3Ctext%20font-family%3D%22math17f39f8317fbdb1988ef4c628eb%22%20font-size%3D%2216%22%20text-anchor%3D%22middle%22%20x%3D%2220.5%22%20y%3D%2226%22%3E%3D%3C%2Ftext%3E%3Cline%20stroke%3D%22%23000000%22%20stroke-linecap%3D%22square%22%20stroke-width%3D%221%22%20x1%3D%2231.5%22%20x2%3D%2250.5%22%20y1%3D%2220.5%22%20y2%3D%2220.5%22%2F%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%2240.5%22%20y%3D%2215%22%3EW%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%2241.5%22%20y%3D%2237%22%3Et%3C%2Ftext%3E%3C%2Fsvg%3E)
D'aquesta expressió es dedueix que: 1 watt = 1 joule/ 1 segon
En el SI la unitat de la potència és el watt, w, encara que en sistemes mecànics se sol emprar com a unitat el cavall de vapor, CV, que equival a 735 watts.
En general, les màquines presenten una potència pràcticament constant i emprarem les següents fórmules:
- Si estem davant d'un moviment lineal:
format('truetype')%3Bfont-weight%3Anormal%3Bfont-style%3Anormal%3B%7D%3C%2Fstyle%3E%3C%2Fdefs%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%225.5%22%20y%3D%2216%22%3EP%3C%2Ftext%3E%3Ctext%20font-family%3D%22math164ced1e48f486e642fc427eb8a%22%20font-size%3D%2216%22%20text-anchor%3D%22middle%22%20x%3D%2220.5%22%20y%3D%2216%22%3E%3D%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%2234.5%22%20y%3D%2216%22%3EF%3C%2Ftext%3E%3Ctext%20font-family%3D%22math164ced1e48f486e642fc427eb8a%22%20font-size%3D%2216%22%20text-anchor%3D%22middle%22%20x%3D%2244.5%22%20y%3D%2216%22%3E%26%23xB7%3B%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%2252.5%22%20y%3D%2216%22%3Ev%3C%2Ftext%3E%3C%2Fsvg%3E)
- Si es tracta d'un moviment rotatiu:
format('truetype')%3Bfont-weight%3Anormal%3Bfont-style%3Anormal%3B%7D%3C%2Fstyle%3E%3C%2Fdefs%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%225.5%22%20y%3D%2216%22%3EP%3C%2Ftext%3E%3Ctext%20font-family%3D%22math164ced1e48f486e642fc427eb8a%22%20font-size%3D%2216%22%20text-anchor%3D%22middle%22%20x%3D%2220.5%22%20y%3D%2216%22%3E%3D%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%2235.5%22%20y%3D%2216%22%3EM%3C%2Ftext%3E%3Ctext%20font-family%3D%22math164ced1e48f486e642fc427eb8a%22%20font-size%3D%2216%22%20text-anchor%3D%22middle%22%20x%3D%2247.5%22%20y%3D%2216%22%3E%26%23xB7%3B%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%2257.5%22%20y%3D%2216%22%3E%26%23x3C9%3B%3C%2Ftext%3E%3C%2Fsvg%3E)
3. Sistemes de transmissió de moviment
3.1. Transmissió per politges i corretges o cadenes.
3.2. Transmissió per rodes de fricció.
3.3. Transmissió per engranatges.
3.1. Transmissió per politges i corretges o cadenes.
Com vèiem al principi del tema, l'home sempre ha intentat trobar formes de transmetre moviments d'un lloc a un altre i, al mateix temps, transformar les seves característiques: obtenir moviments amb més o menys velocitat, o amb més o menys potència.
Una forma de transmissió de moviment és a través de sistemes de politges.
 |
Figura: Imagen en Pixabay. CC0 |
Un sistema de transmissió per corretja és un conjunt de dos politges acoblades per mitjà d'una corretja per tal de transmetre forces i velocitats angulars entre arbres paral·lels que es troben a una certa distància.
POLITGES
 |
Figura: Politges |
- una conductora, d'entrada o motora, que va solidària a un eix mogut per un motor.
- una altra conduïda, de sortida o arrossegada, també acoblada a un eix i que és on trobarem la resistència que cal vèncer.
El moviment que es transmet a la roda conduïda té el mateix sentit que el moviment de la roda conductora, mentre que el seu mòdul, com veurem més endavant, depèn dels diàmetres de les politges.

TRANSMISSIÓ PER CORRETJA
Com hem vist, la força que transmeten les politges és deguda al fregament que exerceix la corretja sobre la politja, de manera que la corretja és un element decisiu en aquest sistema de transmissió de moviment.
 |
| Imatge de Borowski a Wikimedia . domini públic |
- Trapezoïdals: Són les més utilitzades, ja que s'adapten fermament al canal de la politja evitant el possible lliscament entre politja i corretja.
- Rodones: S'utilitzen corretges rodones quan aquesta s'ha d'adaptar a corbes tancades quan es necessiten forces petites.
- Planas: Cada vegada de menor utilització, s'empren per transmetre l'esforç de gir i el moviment dels motors a les màquines.
- Dentades: Les corretges dentades, que a més són trapezoïdals, s'utilitzen quan és necessari assegurar l'adherència. En elles l'acoblament s'efectua sobre politges amb dents tallats que reprodueixen el perfil de la corretja. Aquest tipus és el més emprat en les transmissions dels motors dels automòbils.
El procés de transmissió del moviment amb corretja és un procés d'elevat rendiment (95-98%) i preu reduït.
Això fa que aquests mecanismes siguin molt emprats en diferents aparells: electrodomèstics (neveres, rentadores, rentavaixelles ...), electrònics (disqueteres, equips de vídeo i àudio, ...) i en alguns mecanismes dels motors tèrmics (ventilador, distribució , alternador, bomba d'aigua ...)
 |
| Imatge en Mediateca . llicència CC |
Equació fonamental de velocitats per a transmissions per corretja.
| Ø 1 · 1 = Ø 2 · n 2 |
On: Ø 1 és el diàmetre de la politja motriu i 1 la seva velocitat de gir
i Ø 2 i n 2 són el diàmetre ia velocitat de la politja conduïda.
La relació de transmissió és la relació que existeix entre la velocitat de gir de l'arbre motor i la velocitat de l'arbre resistent.
format('truetype')%3Bfont-weight%3Anormal%3Bfont-style%3Anormal%3B%7D%3C%2Fstyle%3E%3C%2Fdefs%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%222.5%22%20y%3D%2232%22%3Ei%3C%2Ftext%3E%3Ctext%20font-family%3D%22math17c17a780f982fff3696706744a%22%20font-size%3D%2216%22%20text-anchor%3D%22middle%22%20x%3D%2213.5%22%20y%3D%2232%22%3E%3D%3C%2Ftext%3E%3Cline%20stroke%3D%22%23000000%22%20stroke-linecap%3D%22square%22%20stroke-width%3D%221%22%20x1%3D%2224.5%22%20x2%3D%2244.5%22%20y1%3D%2226.5%22%20y2%3D%2226.5%22%2F%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%2230.5%22%20y%3D%2216%22%3En%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2212%22%20text-anchor%3D%22middle%22%20x%3D%2239.5%22%20y%3D%2221%22%3E2%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%2230.5%22%20y%3D%2243%22%3En%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2212%22%20text-anchor%3D%22middle%22%20x%3D%2239.5%22%20y%3D%2248%22%3E1%3C%2Ftext%3E%3Ctext%20font-family%3D%22math17c17a780f982fff3696706744a%22%20font-size%3D%2216%22%20text-anchor%3D%22middle%22%20x%3D%2255.5%22%20y%3D%2232%22%3E%3D%3C%2Ftext%3E%3Cline%20stroke%3D%22%23000000%22%20stroke-linecap%3D%22square%22%20stroke-width%3D%221%22%20x1%3D%2266.5%22%20x2%3D%2293.5%22%20y1%3D%2226.5%22%20y2%3D%2226.5%22%2F%3E%3Ctext%20font-family%3D%22math17c17a780f982fff3696706744a%22%20font-size%3D%2216%22%20text-anchor%3D%22middle%22%20x%3D%2276.5%22%20y%3D%2216%22%3E%26%23x2205%3B%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2212%22%20text-anchor%3D%22middle%22%20x%3D%2288.5%22%20y%3D%2221%22%3E1%3C%2Ftext%3E%3Ctext%20font-family%3D%22math17c17a780f982fff3696706744a%22%20font-size%3D%2216%22%20text-anchor%3D%22middle%22%20x%3D%2276.5%22%20y%3D%2244%22%3E%26%23x2205%3B%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2212%22%20text-anchor%3D%22middle%22%20x%3D%2288.5%22%20y%3D%2249%22%3E2%3C%2Ftext%3E%3C%2Fsvg%3E)

 |
| Figura: Sistema de corrioles múltiples |
TRANSMISSIÓ PER CADENA
La transmissió per cadena és similar a la transmissió per corretja. S'efectua també entre arbres paral·lels, però en aquest cas, enfilant les dents d'un pinyó amb les baules d'una cadena; l'acoblament entre cadena i dents s'efectua sense lliscament i engranen un a un.
S'empra quan s'han de transmetre grans potències amb relacions de transmissió reduïdes.
 |  |
| Imatge de Bladeth a Wikimedia . domini públic | Imatge en Wikimedia . domini públic |
Equació fonamental de velocitats i relació de transmissió per a transmissions per cadena.
Així, en lloc d'aplicar la fórmula respecte al diàmetre, es fa respecte al nombre de dents de les rodes. Trucant Z 1 al nombre de dents de la roda motora i Z 2 al de la conduïda, s'ha de complir:
| n1· Z 1 = n 2 · Z 2 |
format('truetype')%3Bfont-weight%3Anormal%3Bfont-style%3Anormal%3B%7D%3C%2Fstyle%3E%3C%2Fdefs%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%222.5%22%20y%3D%2231%22%3Ei%3C%2Ftext%3E%3Ctext%20font-family%3D%22math17f39f8317fbdb1988ef4c628eb%22%20font-size%3D%2216%22%20text-anchor%3D%22middle%22%20x%3D%2213.5%22%20y%3D%2231%22%3E%3D%3C%2Ftext%3E%3Cline%20stroke%3D%22%23000000%22%20stroke-linecap%3D%22square%22%20stroke-width%3D%221%22%20x1%3D%2224.5%22%20x2%3D%2244.5%22%20y1%3D%2225.5%22%20y2%3D%2225.5%22%2F%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%2230.5%22%20y%3D%2215%22%3En%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2212%22%20text-anchor%3D%22middle%22%20x%3D%2239.5%22%20y%3D%2220%22%3E2%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%2230.5%22%20y%3D%2242%22%3En%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2212%22%20text-anchor%3D%22middle%22%20x%3D%2239.5%22%20y%3D%2247%22%3E1%3C%2Ftext%3E%3Ctext%20font-family%3D%22math17f39f8317fbdb1988ef4c628eb%22%20font-size%3D%2216%22%20text-anchor%3D%22middle%22%20x%3D%2255.5%22%20y%3D%2231%22%3E%3D%3C%2Ftext%3E%3Cline%20stroke%3D%22%23000000%22%20stroke-linecap%3D%22square%22%20stroke-width%3D%221%22%20x1%3D%2266.5%22%20x2%3D%2287.5%22%20y1%3D%2225.5%22%20y2%3D%2225.5%22%2F%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%2273.5%22%20y%3D%2215%22%3EZ%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2212%22%20text-anchor%3D%22middle%22%20x%3D%2282.5%22%20y%3D%2220%22%3E1%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%2273.5%22%20y%3D%2242%22%3EZ%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2212%22%20text-anchor%3D%22middle%22%20x%3D%2282.5%22%20y%3D%2247%22%3E2%3C%2Ftext%3E%3C%2Fsvg%3E)
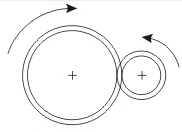
3.2. Transmissió per rodes de fricció.
 |
| Dues rodes en contacte |
Aquest tipus de transmissió es realitza sobre eixos paral·lels i, al contrari que en la transmissió per corretja o cadena, el sentit de gir de l'eix motriu serà contrari al de l'eix conduït.
Es fa servir quan es pretenen transmetre petites potències, ja que en estar en contacte una roda amb una altra es produeix una pèrdua de velocitat.
Com que funciona per fregament i pressió, les rodes pateixen un continu desgast, també poden ser interiors aquestes rodes.
S'utilitzen en el camp de l'electrònica i de la informàtica, equips de so, vídeo, impressores ...
Amb les rodes de fricció es compleixen les mateixes fórmules que per a les politges:
format('truetype')%3Bfont-weight%3Anormal%3Bfont-style%3Anormal%3B%7D%3C%2Fstyle%3E%3C%2Fdefs%3E%3Ctext%20font-family%3D%22math151cb0266c3bd8c226104d64b63%22%20font-size%3D%2216%22%20text-anchor%3D%22middle%22%20x%3D%228.5%22%20y%3D%2216%22%3E%26%23x2205%3B%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2212%22%20text-anchor%3D%22middle%22%20x%3D%2220.5%22%20y%3D%2221%22%3E1%3C%2Ftext%3E%3Ctext%20font-family%3D%22math151cb0266c3bd8c226104d64b63%22%20font-size%3D%2216%22%20text-anchor%3D%22middle%22%20x%3D%2228.5%22%20y%3D%2216%22%3E%26%23xB7%3B%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%2236.5%22%20y%3D%2216%22%3En%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2212%22%20text-anchor%3D%22middle%22%20x%3D%2245.5%22%20y%3D%2221%22%3E1%3C%2Ftext%3E%3Ctext%20font-family%3D%22math151cb0266c3bd8c226104d64b63%22%20font-size%3D%2216%22%20text-anchor%3D%22middle%22%20x%3D%2257.5%22%20y%3D%2216%22%3E%3D%3C%2Ftext%3E%3Ctext%20font-family%3D%22math151cb0266c3bd8c226104d64b63%22%20font-size%3D%2216%22%20text-anchor%3D%22middle%22%20x%3D%2274.5%22%20y%3D%2216%22%3E%26%23x2205%3B%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2212%22%20text-anchor%3D%22middle%22%20x%3D%2286.5%22%20y%3D%2221%22%3E2%3C%2Ftext%3E%3Ctext%20font-family%3D%22math151cb0266c3bd8c226104d64b63%22%20font-size%3D%2216%22%20text-anchor%3D%22middle%22%20x%3D%2294.5%22%20y%3D%2216%22%3E%26%23xB7%3B%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%22102.5%22%20y%3D%2216%22%3En%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2212%22%20text-anchor%3D%22middle%22%20x%3D%22111.5%22%20y%3D%2221%22%3E2%3C%2Ftext%3E%3Ctext%20font-family%3D%22math151cb0266c3bd8c226104d64b63%22%20font-size%3D%2216%22%20text-anchor%3D%22middle%22%20x%3D%22121.5%22%20y%3D%2216%22%3E%26%23xA0%3B%26%23xA0%3B%3C%2Ftext%3E%3C%2Fsvg%3E) | format('truetype')%3Bfont-weight%3Anormal%3Bfont-style%3Anormal%3B%7D%3C%2Fstyle%3E%3C%2Fdefs%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%222.5%22%20y%3D%2232%22%3Ei%3C%2Ftext%3E%3Ctext%20font-family%3D%22math17c17a780f982fff3696706744a%22%20font-size%3D%2216%22%20text-anchor%3D%22middle%22%20x%3D%2213.5%22%20y%3D%2232%22%3E%3D%3C%2Ftext%3E%3Cline%20stroke%3D%22%23000000%22%20stroke-linecap%3D%22square%22%20stroke-width%3D%221%22%20x1%3D%2224.5%22%20x2%3D%2244.5%22%20y1%3D%2226.5%22%20y2%3D%2226.5%22%2F%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%2230.5%22%20y%3D%2216%22%3En%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2212%22%20text-anchor%3D%22middle%22%20x%3D%2239.5%22%20y%3D%2221%22%3E2%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%2230.5%22%20y%3D%2243%22%3En%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2212%22%20text-anchor%3D%22middle%22%20x%3D%2239.5%22%20y%3D%2248%22%3E1%3C%2Ftext%3E%3Ctext%20font-family%3D%22math17c17a780f982fff3696706744a%22%20font-size%3D%2216%22%20text-anchor%3D%22middle%22%20x%3D%2255.5%22%20y%3D%2232%22%3E%3D%3C%2Ftext%3E%3Cline%20stroke%3D%22%23000000%22%20stroke-linecap%3D%22square%22%20stroke-width%3D%221%22%20x1%3D%2265.5%22%20x2%3D%2292.5%22%20y1%3D%2226.5%22%20y2%3D%2226.5%22%2F%3E%3Ctext%20font-family%3D%22math17c17a780f982fff3696706744a%22%20font-size%3D%2216%22%20text-anchor%3D%22middle%22%20x%3D%2275.5%22%20y%3D%2216%22%3E%26%23x2205%3B%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2212%22%20text-anchor%3D%22middle%22%20x%3D%2287.5%22%20y%3D%2221%22%3E1%3C%2Ftext%3E%3Ctext%20font-family%3D%22math17c17a780f982fff3696706744a%22%20font-size%3D%2216%22%20text-anchor%3D%22middle%22%20x%3D%2275.5%22%20y%3D%2244%22%3E%26%23x2205%3B%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2212%22%20text-anchor%3D%22middle%22%20x%3D%2287.5%22%20y%3D%2249%22%3E2%3C%2Ftext%3E%3C%2Fsvg%3E) |
La distància entre eixos de les rodes serà:
format('truetype')%3Bfont-weight%3Anormal%3Bfont-style%3Anormal%3B%7D%3C%2Fstyle%3E%3C%2Fdefs%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%224.5%22%20y%3D%2232%22%3Ec%3C%2Ftext%3E%3Ctext%20font-family%3D%22math1564b4c0e54101ac57a0cb68c16%22%20font-size%3D%2216%22%20text-anchor%3D%22middle%22%20x%3D%2217.5%22%20y%3D%2232%22%3E%3D%3C%2Ftext%3E%3Cline%20stroke%3D%22%23000000%22%20stroke-linecap%3D%22square%22%20stroke-width%3D%221%22%20x1%3D%2228.5%22%20x2%3D%2280.5%22%20y1%3D%2226.5%22%20y2%3D%2226.5%22%2F%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%2234.5%22%20y%3D%2216%22%3E%26%23x3D5%3B%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2212%22%20text-anchor%3D%22middle%22%20x%3D%2243.5%22%20y%3D%2221%22%3E1%3C%2Ftext%3E%3Ctext%20font-family%3D%22math1564b4c0e54101ac57a0cb68c16%22%20font-size%3D%2216%22%20text-anchor%3D%22middle%22%20x%3D%2254.5%22%20y%3D%2216%22%3E%2B%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%2266.5%22%20y%3D%2216%22%3E%26%23x3D5%3B%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2212%22%20text-anchor%3D%22middle%22%20x%3D%2275.5%22%20y%3D%2221%22%3E2%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20text-anchor%3D%22middle%22%20x%3D%2254.5%22%20y%3D%2243%22%3E2%3C%2Ftext%3E%3C%2Fsvg%3E)
En el cas que les rodes de fricció també siguin interiors, aquesta distància serà:
format('truetype')%3Bfont-weight%3Anormal%3Bfont-style%3Anormal%3B%7D%3C%2Fstyle%3E%3C%2Fdefs%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%224.5%22%20y%3D%2232%22%3Ec%3C%2Ftext%3E%3Ctext%20font-family%3D%22math143f4d31b04031e49f5eb18baba%22%20font-size%3D%2216%22%20text-anchor%3D%22middle%22%20x%3D%2217.5%22%20y%3D%2232%22%3E%3D%3C%2Ftext%3E%3Cline%20stroke%3D%22%23000000%22%20stroke-linecap%3D%22square%22%20stroke-width%3D%221%22%20x1%3D%2228.5%22%20x2%3D%2280.5%22%20y1%3D%2226.5%22%20y2%3D%2226.5%22%2F%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%2234.5%22%20y%3D%2216%22%3E%26%23x3D5%3B%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2212%22%20text-anchor%3D%22middle%22%20x%3D%2243.5%22%20y%3D%2221%22%3E1%3C%2Ftext%3E%3Ctext%20font-family%3D%22math143f4d31b04031e49f5eb18baba%22%20font-size%3D%2216%22%20text-anchor%3D%22middle%22%20x%3D%2254.5%22%20y%3D%2216%22%3E%26%23x2212%3B%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%2266.5%22%20y%3D%2216%22%3E%26%23x3D5%3B%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2212%22%20text-anchor%3D%22middle%22%20x%3D%2275.5%22%20y%3D%2221%22%3E2%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20text-anchor%3D%22middle%22%20x%3D%2254.5%22%20y%3D%2243%22%3E2%3C%2Ftext%3E%3C%2Fsvg%3E)
3.3. Transmissió per engranatges.
Aquests mecanismes presenten nombrosos avantatges respecte a les corretges i politges, encara que també alguns inconvenients.
AVANTATGES
| INCONVENIENTS
|
|---|
Pel que fa a relació de transmissió i velocitats en el moviment, són vàlides les fórmules que hem estat considerant fins ara, referides al nombre de dents dels engranatges.
format('truetype')%3Bfont-weight%3Anormal%3Bfont-style%3Anormal%3B%7D%3C%2Fstyle%3E%3C%2Fdefs%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%224.5%22%20y%3D%2216%22%3En%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2212%22%20text-anchor%3D%22middle%22%20x%3D%2213.5%22%20y%3D%2221%22%3E1%3C%2Ftext%3E%3Ctext%20font-family%3D%22math1f610129a5a3df6132da54d2698%22%20font-size%3D%2216%22%20text-anchor%3D%22middle%22%20x%3D%2221.5%22%20y%3D%2216%22%3E%26%23xB7%3B%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%2230.5%22%20y%3D%2216%22%3EZ%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2212%22%20text-anchor%3D%22middle%22%20x%3D%2239.5%22%20y%3D%2221%22%3E1%3C%2Ftext%3E%3Ctext%20font-family%3D%22math1f610129a5a3df6132da54d2698%22%20font-size%3D%2216%22%20text-anchor%3D%22middle%22%20x%3D%2251.5%22%20y%3D%2216%22%3E%3D%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%2264.5%22%20y%3D%2216%22%3En%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2212%22%20text-anchor%3D%22middle%22%20x%3D%2273.5%22%20y%3D%2221%22%3E2%3C%2Ftext%3E%3Ctext%20font-family%3D%22math1f610129a5a3df6132da54d2698%22%20font-size%3D%2216%22%20text-anchor%3D%22middle%22%20x%3D%2281.5%22%20y%3D%2216%22%3E%26%23xB7%3B%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%2290.5%22%20y%3D%2216%22%3EZ%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2212%22%20text-anchor%3D%22middle%22%20x%3D%2299.5%22%20y%3D%2221%22%3E2%3C%2Ftext%3E%3C%2Fsvg%3E) | format('truetype')%3Bfont-weight%3Anormal%3Bfont-style%3Anormal%3B%7D%3C%2Fstyle%3E%3C%2Fdefs%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%222.5%22%20y%3D%2231%22%3Ei%3C%2Ftext%3E%3Ctext%20font-family%3D%22math17f39f8317fbdb1988ef4c628eb%22%20font-size%3D%2216%22%20text-anchor%3D%22middle%22%20x%3D%2213.5%22%20y%3D%2231%22%3E%3D%3C%2Ftext%3E%3Cline%20stroke%3D%22%23000000%22%20stroke-linecap%3D%22square%22%20stroke-width%3D%221%22%20x1%3D%2224.5%22%20x2%3D%2244.5%22%20y1%3D%2225.5%22%20y2%3D%2225.5%22%2F%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%2230.5%22%20y%3D%2215%22%3En%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2212%22%20text-anchor%3D%22middle%22%20x%3D%2239.5%22%20y%3D%2220%22%3E2%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%2230.5%22%20y%3D%2242%22%3En%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2212%22%20text-anchor%3D%22middle%22%20x%3D%2239.5%22%20y%3D%2247%22%3E1%3C%2Ftext%3E%3Ctext%20font-family%3D%22math17f39f8317fbdb1988ef4c628eb%22%20font-size%3D%2216%22%20text-anchor%3D%22middle%22%20x%3D%2255.5%22%20y%3D%2231%22%3E%3D%3C%2Ftext%3E%3Cline%20stroke%3D%22%23000000%22%20stroke-linecap%3D%22square%22%20stroke-width%3D%221%22%20x1%3D%2266.5%22%20x2%3D%2287.5%22%20y1%3D%2225.5%22%20y2%3D%2225.5%22%2F%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%2273.5%22%20y%3D%2215%22%3EZ%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2212%22%20text-anchor%3D%22middle%22%20x%3D%2282.5%22%20y%3D%2220%22%3E1%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%2273.5%22%20y%3D%2242%22%3EZ%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2212%22%20text-anchor%3D%22middle%22%20x%3D%2282.5%22%20y%3D%2247%22%3E2%3C%2Ftext%3E%3C%2Fsvg%3E) | format('truetype')%3Bfont-weight%3Anormal%3Bfont-style%3Anormal%3B%7D%3C%2Fstyle%3E%3C%2Fdefs%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%224.5%22%20y%3D%2232%22%3Ec%3C%2Ftext%3E%3Ctext%20font-family%3D%22math1564b4c0e54101ac57a0cb68c16%22%20font-size%3D%2216%22%20text-anchor%3D%22middle%22%20x%3D%2217.5%22%20y%3D%2232%22%3E%3D%3C%2Ftext%3E%3Cline%20stroke%3D%22%23000000%22%20stroke-linecap%3D%22square%22%20stroke-width%3D%221%22%20x1%3D%2227.5%22%20x2%3D%2279.5%22%20y1%3D%2226.5%22%20y2%3D%2226.5%22%2F%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%2233.5%22%20y%3D%2216%22%3E%26%23x3D5%3B%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2212%22%20text-anchor%3D%22middle%22%20x%3D%2242.5%22%20y%3D%2221%22%3E1%3C%2Ftext%3E%3Ctext%20font-family%3D%22math1564b4c0e54101ac57a0cb68c16%22%20font-size%3D%2216%22%20text-anchor%3D%22middle%22%20x%3D%2253.5%22%20y%3D%2216%22%3E%2B%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%2265.5%22%20y%3D%2216%22%3E%26%23x3D5%3B%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2212%22%20text-anchor%3D%22middle%22%20x%3D%2274.5%22%20y%3D%2221%22%3E2%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20text-anchor%3D%22middle%22%20x%3D%2253.5%22%20y%3D%2243%22%3E2%3C%2Ftext%3E%3C%2Fsvg%3E) |
S'utilitzen en transmissions d'eixos paral·lels. Són un dels mecanismes més utilitzats, i es troben en qualsevol tipus de màquina: rellotges, joguines, màquines eines, etc.
 |
| Imatge de Joe deSousa a Wikimedia .Llicència CC |
Engranatges helicoïdals

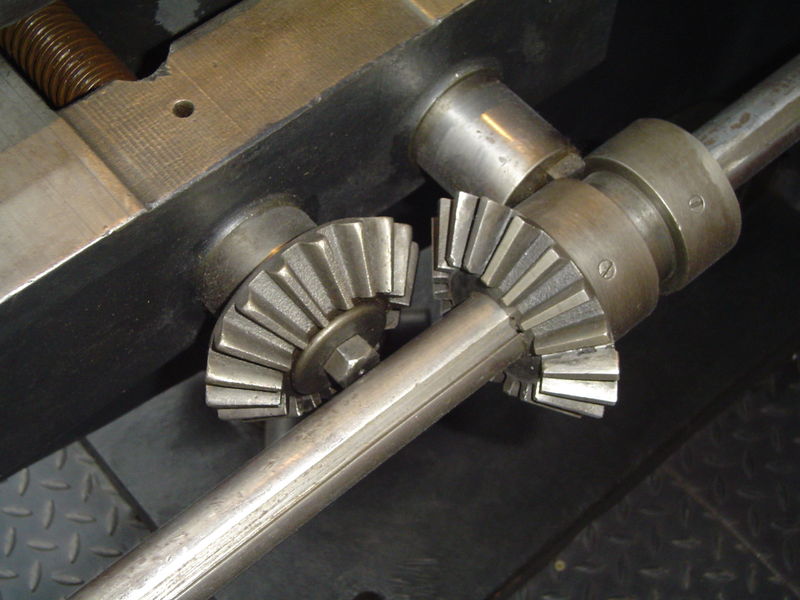
Engranatges cònics
Es fan servir per transmetre moviment entre eixos perpendiculars, o per eixos amb angles diferents a 90 graus.
Es tracta de rodes dentades en forma de tronc de con, i poden ser rectes o corbs (hipoides), sent aquests últims molt utilitzats en sistemes de transmissió per a automòbils.


En aquest mecanisme la transmissió es realitza entre més de dos eixos simultàniament, per al que és necessari que en cada eix intermedi vagin muntades dues rodes dentades (Z 2 i z 2). Una d'elles engrana amb la roda motriu, que és la que proporciona el moviment, i l'altra connecta amb l'eix següent al que condueix.

4. Sistemes de transformació de moviment
Sempre que es dissenya una nova màquina per a realitzar una activitat concreta cal considerar tots i cada un dels mecanismes que constituiran el sistema mecànic de transmissió, transformació i regulació del moviment de la mateixa.
L'objectiu final ha de ser dissenyar i fabricar una màquina, en la qual tots els seus components realitzen sincronitzadament la tasca que tenen encomanada, que el conjunt sigui rendible, segur, eficaç i que compleixi amb els requisits i normatives mediambientals.
En un gran nombre d'ocasions serà necessari transformar el moviment rotatiu del motor que alimenta l'equip en un moviment d'un altre tipus, per exemple lineal o alternatiu. És doncs necessari desenvolupar múltiples mecanismes transformadors de moviment. Aquests mecanismes poden arribar a ser molt variats i complexos, però tots ells estaran basats en els diferents principis de transmissió que estudiarem al llarg d'aquest punt.
 |
| Imatge en Pixabay . llicència CC0 |
4.1. Pinyó-Cremallera
Aquest mecanisme transforma el moviment giratori d'un eix, en el qual va muntat un pinyó, en moviment rectilini, a l'engranar les dents del pinyó amb les dents d'una barra prismàtica (cremallera) que es desplaça longitudinalment.
|
a) Mecanismes pinyó-cremallera |
|
b) Porta corredera |
|
c) Trepant de columna |
Figura: Mecanisme pinyó-cremallera. |



 |  |
Figura: Pinyó-cremallera | Figura: Porta corredera. |
Anomenarem avanç (A) del pinyó a la distància que avança la cremallera en una volta completa del pinyó, el seu valor coincideix amb el perímetre de la circumferència primitiva i vindrà donat per la fórmula:
format('truetype')%3Bfont-weight%3Anormal%3Bfont-style%3Anormal%3B%7D%3C%2Fstyle%3E%3C%2Fdefs%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%225.5%22%20y%3D%2216%22%3EA%3C%2Ftext%3E%3Ctext%20font-family%3D%22math1e14df73ed0e021ecf8cc5dcb15%22%20font-size%3D%2216%22%20text-anchor%3D%22middle%22%20x%3D%2220.5%22%20y%3D%2216%22%3E%3D%3C%2Ftext%3E%3Ctext%20font-family%3D%22math1e14df73ed0e021ecf8cc5dcb15%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%2235.5%22%20y%3D%2216%22%3E%26%23x3C0%3B%3C%2Ftext%3E%3Ctext%20font-family%3D%22math1e14df73ed0e021ecf8cc5dcb15%22%20font-size%3D%2216%22%20text-anchor%3D%22middle%22%20x%3D%2246.5%22%20y%3D%2216%22%3E%26%23xB7%3B%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%2254.5%22%20y%3D%2216%22%3Ed%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2212%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%2263.5%22%20y%3D%2221%22%3Ep%3C%2Ftext%3E%3Ctext%20font-family%3D%22math1e14df73ed0e021ecf8cc5dcb15%22%20font-size%3D%2216%22%20text-anchor%3D%22middle%22%20x%3D%2276.5%22%20y%3D%2216%22%3E%3D%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%2289.5%22%20y%3D%2216%22%3Ep%3C%2Ftext%3E%3Ctext%20font-family%3D%22math1e14df73ed0e021ecf8cc5dcb15%22%20font-size%3D%2216%22%20text-anchor%3D%22middle%22%20x%3D%2299.5%22%20y%3D%2216%22%3E%26%23xB7%3B%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%22108.5%22%20y%3D%2216%22%3EZ%3C%2Ftext%3E%3C%2Fsvg%3E)
on:
- dp representa el diàmetre primitiu del pinyó en metres.
- p representa el pas de les dents del pinyó en metres.
- Z representa el nombre de dents del pinyó.
D'altra banda la velocitat d'avanç (Va) de la cremallera expressada en m / s. Es calcularà segons la fórmula:
format('truetype')%3Bfont-weight%3Anormal%3Bfont-style%3Anormal%3B%7D%3C%2Fstyle%3E%3C%2Fdefs%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%225.5%22%20y%3D%2227%22%3EV%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2212%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%2215.5%22%20y%3D%2232%22%3E%26%23x3B1%3B%3C%2Ftext%3E%3Ctext%20font-family%3D%22math164ced1e48f486e642fc427eb8a%22%20font-size%3D%2216%22%20text-anchor%3D%22middle%22%20x%3D%2228.5%22%20y%3D%2227%22%3E%3D%3C%2Ftext%3E%3Cline%20stroke%3D%22%23000000%22%20stroke-linecap%3D%22square%22%20stroke-width%3D%221%22%20x1%3D%2239.5%22%20x2%3D%2272.5%22%20y1%3D%2221.5%22%20y2%3D%2221.5%22%2F%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%2246.5%22%20y%3D%2216%22%3EA%3C%2Ftext%3E%3Ctext%20font-family%3D%22math164ced1e48f486e642fc427eb8a%22%20font-size%3D%2216%22%20text-anchor%3D%22middle%22%20x%3D%2257.5%22%20y%3D%2216%22%3E%26%23xB7%3B%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%2265.5%22%20y%3D%2216%22%3En%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20text-anchor%3D%22middle%22%20x%3D%2256.5%22%20y%3D%2238%22%3E60%3C%2Ftext%3E%3Ctext%20font-family%3D%22math164ced1e48f486e642fc427eb8a%22%20font-size%3D%2216%22%20text-anchor%3D%22middle%22%20x%3D%2283.5%22%20y%3D%2227%22%3E%3D%3C%2Ftext%3E%3Cline%20stroke%3D%22%23000000%22%20stroke-linecap%3D%22square%22%20stroke-width%3D%221%22%20x1%3D%2294.5%22%20x2%3D%22144.5%22%20y1%3D%2221.5%22%20y2%3D%2221.5%22%2F%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%22100.5%22%20y%3D%2216%22%3Ep%3C%2Ftext%3E%3Ctext%20font-family%3D%22math164ced1e48f486e642fc427eb8a%22%20font-size%3D%2216%22%20text-anchor%3D%22middle%22%20x%3D%22110.5%22%20y%3D%2216%22%3E%26%23xB7%3B%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%22119.5%22%20y%3D%2216%22%3EZ%3C%2Ftext%3E%3Ctext%20font-family%3D%22math164ced1e48f486e642fc427eb8a%22%20font-size%3D%2216%22%20text-anchor%3D%22middle%22%20x%3D%22129.5%22%20y%3D%2216%22%3E%26%23xB7%3B%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%22137.5%22%20y%3D%2216%22%3En%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20text-anchor%3D%22middle%22%20x%3D%22120.5%22%20y%3D%2238%22%3E60%3C%2Ftext%3E%3C%2Fsvg%3E)
On n és la velocitat d gir del pinyó, en rpm.
- El pas p representa la distància en metres entre dues dents,
- La seva inversa representarà per tant les dents que hi ha en un metre d'avanç, per tant en un metre de cremallera, es designarà per N.
format('truetype')%3Bfont-weight%3Anormal%3Bfont-style%3Anormal%3B%7D%3C%2Fstyle%3E%3C%2Fdefs%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%226.5%22%20y%3D%2226%22%3EN%3C%2Ftext%3E%3Ctext%20font-family%3D%22math17f39f8317fbdb1988ef4c628eb%22%20font-size%3D%2216%22%20text-anchor%3D%22middle%22%20x%3D%2221.5%22%20y%3D%2226%22%3E%3D%3C%2Ftext%3E%3Cline%20stroke%3D%22%23000000%22%20stroke-linecap%3D%22square%22%20stroke-width%3D%221%22%20x1%3D%2232.5%22%20x2%3D%2245.5%22%20y1%3D%2220.5%22%20y2%3D%2220.5%22%2F%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20text-anchor%3D%22middle%22%20x%3D%2239.5%22%20y%3D%2215%22%3E1%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%2238.5%22%20y%3D%2237%22%3Ep%3C%2Ftext%3E%3Ctext%20font-family%3D%22math17f39f8317fbdb1988ef4c628eb%22%20font-size%3D%2216%22%20text-anchor%3D%22middle%22%20x%3D%2256.5%22%20y%3D%2226%22%3E%3D%3C%2Ftext%3E%3Cline%20stroke%3D%22%23000000%22%20stroke-linecap%3D%22square%22%20stroke-width%3D%221%22%20x1%3D%2267.5%22%20x2%3D%2282.5%22%20y1%3D%2220.5%22%20y2%3D%2220.5%22%2F%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%2275.5%22%20y%3D%2215%22%3EZ%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%2274.5%22%20y%3D%2237%22%3EA%3C%2Ftext%3E%3C%2Fsvg%3E)
Per tant la velocitat d'avanç (Va) es pot expressar per:
format('truetype')%3Bfont-weight%3Anormal%3Bfont-style%3Anormal%3B%7D%3C%2Fstyle%3E%3C%2Fdefs%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%225.5%22%20y%3D%2227%22%3EV%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2212%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%2215.5%22%20y%3D%2232%22%3E%26%23x3B1%3B%3C%2Ftext%3E%3Ctext%20font-family%3D%22math164ced1e48f486e642fc427eb8a%22%20font-size%3D%2216%22%20text-anchor%3D%22middle%22%20x%3D%2228.5%22%20y%3D%2227%22%3E%3D%3C%2Ftext%3E%3Cline%20stroke%3D%22%23000000%22%20stroke-linecap%3D%22square%22%20stroke-width%3D%221%22%20x1%3D%2239.5%22%20x2%3D%2289.5%22%20y1%3D%2221.5%22%20y2%3D%2221.5%22%2F%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%2245.5%22%20y%3D%2216%22%3Ep%3C%2Ftext%3E%3Ctext%20font-family%3D%22math164ced1e48f486e642fc427eb8a%22%20font-size%3D%2216%22%20text-anchor%3D%22middle%22%20x%3D%2255.5%22%20y%3D%2216%22%3E%26%23xB7%3B%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%2264.5%22%20y%3D%2216%22%3EZ%3C%2Ftext%3E%3Ctext%20font-family%3D%22math164ced1e48f486e642fc427eb8a%22%20font-size%3D%2216%22%20text-anchor%3D%22middle%22%20x%3D%2274.5%22%20y%3D%2216%22%3E%26%23xB7%3B%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%2282.5%22%20y%3D%2216%22%3En%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20text-anchor%3D%22middle%22%20x%3D%2265.5%22%20y%3D%2238%22%3E60%3C%2Ftext%3E%3Ctext%20font-family%3D%22math164ced1e48f486e642fc427eb8a%22%20font-size%3D%2216%22%20text-anchor%3D%22middle%22%20x%3D%22100.5%22%20y%3D%2227%22%3E%3D%3C%2Ftext%3E%3Cline%20stroke%3D%22%23000000%22%20stroke-linecap%3D%22square%22%20stroke-width%3D%221%22%20x1%3D%22111.5%22%20x2%3D%22153.5%22%20y1%3D%2221.5%22%20y2%3D%2221.5%22%2F%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%22123.5%22%20y%3D%2216%22%3EZ%3C%2Ftext%3E%3Ctext%20font-family%3D%22math164ced1e48f486e642fc427eb8a%22%20font-size%3D%2216%22%20text-anchor%3D%22middle%22%20x%3D%22133.5%22%20y%3D%2216%22%3E%26%23xB7%3B%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%22141.5%22%20y%3D%2216%22%3En%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20text-anchor%3D%22middle%22%20x%3D%22122.5%22%20y%3D%2239%22%3E60%3C%2Ftext%3E%3Ctext%20font-family%3D%22math164ced1e48f486e642fc427eb8a%22%20font-size%3D%2216%22%20text-anchor%3D%22middle%22%20x%3D%22135.5%22%20y%3D%2239%22%3E%26%23xB7%3B%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%22145.5%22%20y%3D%2239%22%3EN%3C%2Ftext%3E%3C%2Fsvg%3E)
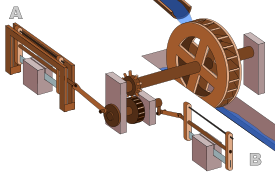
4.2. Cargol sense fi-Corona
En aquest mecanisme un cargol sens fi (1) va muntat en l'eix motor, fent girar la corona que és l'eix de sortida (2). Aquest mecanisme no pot funcionar en sentit contrari, és a dir, és irreversible.
Amb aquest mecanisme, s'aconsegueix transmetre força i moviment entre dos eixos perpendiculars, amb relacions de transmissió molt elevades.
Mentre els cargols de força són generalment de rosca simple, els tornilllos infinitat tenen usualment rosques múltiples. Al nombre de rosques d'un cargol sens fi se l'anomena nombre d'entrades. Aquest valor determina la velocitat de gir de la corona de sortida.
Si la infinitat és d'una sola entrada, per cada volta que gira el cargol, la corona avança una dent. O el que és igual perquè la corona d'una volta completa el cargol sens fi ha hagut de girar tantes voltes com dents té la corona.
En l'esquema de la figura superior la infinitat és de dues entrades, de manera que cada volta d'aquest, la corona avança dues dents.
 |
Figura: Cargol sens fi connectat a un motor |
La velocitat de gir de tots dos eixos dependrà del nombre de dents de la corona (Z 2) com del nombre d'entrades (i 1) del cargol sens fi i ve donada per:
format('truetype')%3Bfont-weight%3Anormal%3Bfont-style%3Anormal%3B%7D%3C%2Fstyle%3E%3C%2Fdefs%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%224.5%22%20y%3D%2216%22%3En%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2212%22%20text-anchor%3D%22middle%22%20x%3D%2213.5%22%20y%3D%2221%22%3E1%3C%2Ftext%3E%3Ctext%20font-family%3D%22math1f610129a5a3df6132da54d2698%22%20font-size%3D%2216%22%20text-anchor%3D%22middle%22%20x%3D%2221.5%22%20y%3D%2216%22%3E%26%23xB7%3B%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%2229.5%22%20y%3D%2216%22%3Ee%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2212%22%20text-anchor%3D%22middle%22%20x%3D%2238.5%22%20y%3D%2221%22%3E1%3C%2Ftext%3E%3Ctext%20font-family%3D%22math1f610129a5a3df6132da54d2698%22%20font-size%3D%2216%22%20text-anchor%3D%22middle%22%20x%3D%2250.5%22%20y%3D%2216%22%3E%3D%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%2263.5%22%20y%3D%2216%22%3En%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2212%22%20text-anchor%3D%22middle%22%20x%3D%2272.5%22%20y%3D%2221%22%3E2%3C%2Ftext%3E%3Ctext%20font-family%3D%22math1f610129a5a3df6132da54d2698%22%20font-size%3D%2216%22%20text-anchor%3D%22middle%22%20x%3D%2280.5%22%20y%3D%2216%22%3E%26%23xB7%3B%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%2289.5%22%20y%3D%2216%22%3EZ%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2212%22%20text-anchor%3D%22middle%22%20x%3D%2298.5%22%20y%3D%2221%22%3E2%3C%2Ftext%3E%3C%2Fsvg%3E)
Per tant la relació de transmissió del sistema és:
format('truetype')%3Bfont-weight%3Anormal%3Bfont-style%3Anormal%3B%7D%3C%2Fstyle%3E%3C%2Fdefs%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%222.5%22%20y%3D%2231%22%3Ei%3C%2Ftext%3E%3Ctext%20font-family%3D%22math17f39f8317fbdb1988ef4c628eb%22%20font-size%3D%2216%22%20text-anchor%3D%22middle%22%20x%3D%2213.5%22%20y%3D%2231%22%3E%3D%3C%2Ftext%3E%3Cline%20stroke%3D%22%23000000%22%20stroke-linecap%3D%22square%22%20stroke-width%3D%221%22%20x1%3D%2224.5%22%20x2%3D%2244.5%22%20y1%3D%2225.5%22%20y2%3D%2225.5%22%2F%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%2230.5%22%20y%3D%2215%22%3En%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2212%22%20text-anchor%3D%22middle%22%20x%3D%2239.5%22%20y%3D%2220%22%3E2%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%2230.5%22%20y%3D%2242%22%3En%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2212%22%20text-anchor%3D%22middle%22%20x%3D%2239.5%22%20y%3D%2247%22%3E1%3C%2Ftext%3E%3Ctext%20font-family%3D%22math17f39f8317fbdb1988ef4c628eb%22%20font-size%3D%2216%22%20text-anchor%3D%22middle%22%20x%3D%2255.5%22%20y%3D%2231%22%3E%3D%3C%2Ftext%3E%3Cline%20stroke%3D%22%23000000%22%20stroke-linecap%3D%22square%22%20stroke-width%3D%221%22%20x1%3D%2266.5%22%20x2%3D%2287.5%22%20y1%3D%2225.5%22%20y2%3D%2225.5%22%2F%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%2273.5%22%20y%3D%2215%22%3Ee%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2212%22%20text-anchor%3D%22middle%22%20x%3D%2282.5%22%20y%3D%2220%22%3E1%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%2273.5%22%20y%3D%2242%22%3EZ%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2212%22%20text-anchor%3D%22middle%22%20x%3D%2282.5%22%20y%3D%2247%22%3E2%3C%2Ftext%3E%3C%2Fsvg%3E)
La relació de transmissió de velocitat sempre serà menor que la unitat, és a dir el mecanisme produirà reducció de velocitat. A causa de que és el mecanisme que aconsegueix valors elevats de reducció de velocitat s'empra en tacòmetres, carros de màquines eines, cremalleres de direcció per a automòbils, comptadors d'aigua i elèctrics, joguines, ...
 |
| Imatge de M. Schweiss a Wikimedia . llicència CC |
4.3. Biela-Manovella
Aquest mecanisme transforma el moviment circular en moviment rectilini alternatiu.
El sistema està constituït per un element giratori anomenat maneta, connectat a una barra rígida anomenada biela, de manera que quan gira la maneta, la biela està forçada a avançar i retrocedir successivament.
a) Extret de wikipedia CC BY-SA 3.0 | b) Mecanisme de biela i manovella en locomotores de vapor. La biela rep en (5) el moviment lineal de el pistó i el transforma en rotació de les rodes By Panther - CC BY-SA 3.0, | c) Doble serra de pedra romana moguda per roda hidràulica d'Hieràpolis. Del segle III de l'era cristiana, és la mostra més antiga del mecanisme biela-manovella |
 |  |  |
|
|
|
Figura: Sistema biela-manovella. | ||
S'aconsegueix així un moviment alternatiu de vaivé a la biela. A la longitud de desplaçament rep el nom de carrera, i el seu valor depèn de la longitud de la maneta (radi de gir). Quan la maneta dóna una volta completa, la biela es desplaça una distància igual al doble de la longitud de la maneta.
Les posicions extremes del recorregut es diuen punts morts, sent el punt mort superior (pms) el que està a major distància de l'eix de la maneta, i punt mort inferior (pmi) el que està més pròxim.
La distància entre el pms i el pmi es diu carrera i coincideix amb el doble de la longitud de la maneta.
Entre les seves nombroses aplicacions destaquen sobretot les utilitzades en el món de l'automòbil. Així per exemple el moviment alternatiu produït en els pistons dels cilíndros és transformat en gir per mitjà de sistemes biela manovella.
4.4. Cargol-Femella
Mecanisme constituït per un cargol (també anomenat pern) i una femella. El seu funcionament es basa en que si es manté fixa la femella, el moviment giratori del cargol produeix el desplaçament longitudinal del cargol i viceversa.
Mitjançant aquest sistema s'aconsegueix convertir el moviment circular del cargol en moviment rectilini de la femella.
 |
| Moix accionat per un sistema de cargol rosca Imatge de A7N8K a Wikimedia . domini públic |
La cargol igual que qualsevol altre cargol, es caracteritza pel nombre d'entrades (i) i pel pas de la rosca (p).
a) Avenç i pas | a) Parts d'un pern o cargol |
 |  |
|
|
Figura: Cargol. Extret de fcocefax.org | |
Un cargol de 3 mm de pas i una entrada, quan gira una volta completa sobre una femella, produeix un avanç d'aquesta de 3 mm.
En canvi un pern amb el mateix pas i dues entrades, produeix un avanç de la rosca en el mateix temps de 6 mm.
En general l'avanç del pern ve donat per:
format('truetype')%3Bfont-weight%3Anormal%3Bfont-style%3Anormal%3B%7D%3C%2Fstyle%3E%3C%2Fdefs%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%225.5%22%20y%3D%2216%22%3EA%3C%2Ftext%3E%3Ctext%20font-family%3D%22math164ced1e48f486e642fc427eb8a%22%20font-size%3D%2216%22%20text-anchor%3D%22middle%22%20x%3D%2220.5%22%20y%3D%2216%22%3E%3D%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%2233.5%22%20y%3D%2216%22%3Ep%3C%2Ftext%3E%3Ctext%20font-family%3D%22math164ced1e48f486e642fc427eb8a%22%20font-size%3D%2216%22%20text-anchor%3D%22middle%22%20x%3D%2243.5%22%20y%3D%2216%22%3E%26%23xB7%3B%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%2251.5%22%20y%3D%2216%22%3Ee%3C%2Ftext%3E%3C%2Fsvg%3E)
La velocitat d'avanç del pern és:
format('truetype')%3Bfont-weight%3Anormal%3Bfont-style%3Anormal%3B%7D%3C%2Fstyle%3E%3C%2Fdefs%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%225.5%22%20y%3D%2227%22%3EV%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2212%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%2215.5%22%20y%3D%2232%22%3E%26%23x3B1%3B%3C%2Ftext%3E%3Ctext%20font-family%3D%22math164ced1e48f486e642fc427eb8a%22%20font-size%3D%2216%22%20text-anchor%3D%22middle%22%20x%3D%2228.5%22%20y%3D%2227%22%3E%3D%3C%2Ftext%3E%3Cline%20stroke%3D%22%23000000%22%20stroke-linecap%3D%22square%22%20stroke-width%3D%221%22%20x1%3D%2239.5%22%20x2%3D%2288.5%22%20y1%3D%2221.5%22%20y2%3D%2221.5%22%2F%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%2245.5%22%20y%3D%2216%22%3Ep%3C%2Ftext%3E%3Ctext%20font-family%3D%22math164ced1e48f486e642fc427eb8a%22%20font-size%3D%2216%22%20text-anchor%3D%22middle%22%20x%3D%2255.5%22%20y%3D%2216%22%3E%26%23xB7%3B%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%2263.5%22%20y%3D%2216%22%3Ee%3C%2Ftext%3E%3Ctext%20font-family%3D%22math164ced1e48f486e642fc427eb8a%22%20font-size%3D%2216%22%20text-anchor%3D%22middle%22%20x%3D%2273.5%22%20y%3D%2216%22%3E%26%23xB7%3B%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%2281.5%22%20y%3D%2216%22%3En%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20text-anchor%3D%22middle%22%20x%3D%2264.5%22%20y%3D%2238%22%3E60%3C%2Ftext%3E%3C%2Fsvg%3E)
- On n és la velocitat de gir en rpm.
Finalment el temps que tarda la femella a recórrer una distància L vindrà expressat per:
format('truetype')%3Bfont-weight%3Anormal%3Bfont-style%3Anormal%3B%7D%40font-face%7Bfont-family%3A'math17f39f8317fbdb1988ef4c628eb'%3Bsrc%3Aurl(data%3Afont%2Ftruetype%3Bcharset%3Dutf-8%3Bbase64%2CAAEAAAAMAIAAAwBAT1MvMi7iBBMAAADMAAAATmNtYXDEvmKUAAABHAAAADRjdnQgDVUNBwAAAVAAAAA6Z2x5ZoPi2VsAAAGMAAAAsmhlYWQQC2qxAAACQAAAADZoaGVhCGsXSAAAAngAAAAkaG10eE2rRkcAAAKcAAAACGxvY2EAHTwYAAACpAAAAAxtYXhwBT0FPgAAArAAAAAgbmFtZaBxlY4AAALQAAABn3Bvc3QB9wD6AAAEcAAAACBwcmVwa1uragAABJAAAAAUAAADSwGQAAUAAAQABAAAAAAABAAEAAAAAAAAAQEAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAACAgICAAAAAg1UADev96AAAD6ACWAAAAAAACAAEAAQAAABQAAwABAAAAFAAEACAAAAAEAAQAAQAAAD3%2F%2FwAAAD3%2F%2F%2F%2FEAAEAAAAAAAABVAMsAIABAABWACoCWAIeAQ4BLAIsAFoBgAKAAKAA1ACAAAAAAAAAACsAVQCAAKsA1QEAASsABwAAAAIAVQAAAwADqwADAAcAADMRIRElIREhVQKr%2FasCAP4AA6v8VVUDAAACAIAA6wLVAhUAAwAHAGUYAbAIELAG1LAGELAF1LAIELAB1LABELAA1LAGELAHPLAFELAEPLABELACPLAAELADPACwCBCwBtSwBhCwB9SwBxCwAdSwARCwAtSwBhCwBTywBxCwBDywARCwADywAhCwAzwxMBMhNSEdASE1gAJV%2FasCVQHAVdVVVQAAAAEAAAABAADVeM5BXw889QADBAD%2F%2F%2F%2F%2F1joTc%2F%2F%2F%2F%2F%2FWOhNzAAD%2FIASAA6sAAAAKAAIAAQAAAAAAAQAAA%2Bj%2FagAAF3AAAP%2B2BIAAAQAAAAAAAAAAAAAAAAAAAAIDUgBVA1YAgAAAAAAAAAAoAAAAsgABAAAAAgBeAAUAAAAAAAIAgAQAAAAAAAQAAN4AAAAAAAAAFQECAAAAAAAAAAEAEgAAAAAAAAAAAAIADgASAAAAAAAAAAMAMAAgAAAAAAAAAAQAEgBQAAAAAAAAAAUAFgBiAAAAAAAAAAYACQB4AAAAAAAAAAgAHACBAAEAAAAAAAEAEgAAAAEAAAAAAAIADgASAAEAAAAAAAMAMAAgAAEAAAAAAAQAEgBQAAEAAAAAAAUAFgBiAAEAAAAAAAYACQB4AAEAAAAAAAgAHACBAAMAAQQJAAEAEgAAAAMAAQQJAAIADgASAAMAAQQJAAMAMAAgAAMAAQQJAAQAEgBQAAMAAQQJAAUAFgBiAAMAAQQJAAYACQB4AAMAAQQJAAgAHACBAE0AYQB0AGgAIABGAG8AbgB0AFIAZQBnAHUAbABhAHIATQBhAHQAaABzACAARgBvAHIAIABNAG8AcgBlACAATQBhAHQAaAAgAEYAbwBuAHQATQBhAHQAaAAgAEYAbwBuAHQAVgBlAHIAcwBpAG8AbgAgADEALgAwTWF0aF9Gb250AE0AYQB0AGgAcwAgAEYAbwByACAATQBvAHIAZQAAAwAAAAAAAAH0APoAAAAAAAAAAAAAAAAAAAAAAAAAALkHEQAAjYUYALIAAAAVFBOxAAE%2F)format('truetype')%3Bfont-weight%3Anormal%3Bfont-style%3Anormal%3B%7D%3C%2Fstyle%3E%3C%2Fdefs%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%222.5%22%20y%3D%2226%22%3Et%3C%2Ftext%3E%3Ctext%20font-family%3D%22math17f39f8317fbdb1988ef4c628eb%22%20font-size%3D%2216%22%20text-anchor%3D%22middle%22%20x%3D%2213.5%22%20y%3D%2226%22%3E%3D%3C%2Ftext%3E%3Cline%20stroke%3D%22%23000000%22%20stroke-linecap%3D%22square%22%20stroke-width%3D%221%22%20x1%3D%2224.5%22%20x2%3D%2246.5%22%20y1%3D%2220.5%22%20y2%3D%2220.5%22%2F%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%2235.5%22%20y%3D%2215%22%3EL%3C%2Ftext%3E%3Ctext%20font-family%3D%22Arial%22%20font-size%3D%2216%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%2231.5%22%20y%3D%2237%22%3EV%3C%2Ftext%3E%3Ctext%20font-family%3D%22ae2ef524fbf3d9fe611d5a8e90fefdc%22%20font-size%3D%2212%22%20font-style%3D%22italic%22%20text-anchor%3D%22middle%22%20x%3D%2241.5%22%20y%3D%2242%22%3Ea%3C%2Ftext%3E%3C%2Fsvg%3E)
4.5. Lleva. excèntrica
Mecanisme que permet transformar un moviment rotatori en lineal alternatiu.
Es basa en un element de contorn no circular que gira sobre un punt, en girar el perfil d'aquest element provoca la pujada o la baixada d'un seguidor de lleva o un palpador.
Aquest tipus de transformació de moviment és irreversible. És a dir el moviment alternatiu del seguidor no és capaç de produir el gir de l'element rotatori.
El palpador pot accionar una vàlvula, un polsador, ...
 |  |
- El recorregut vertical màxim que efectua el palpador es diu cursa del seguidor.
- Els punts extrems del recorregut corresponen als punts del perfil de la lleva amb distància màxima (radi major) o mínima (radi menor) respecte a l'eix de gir.
- El valor numèric de la cursa s'obté restant, del radi major, el radi menor.

L'excèntrica, és una variació del mecanisme lleva-seguidor. Consisteix en una roda l'eix de gir no coincideix amb el centre de la circumferència. Transforma el moviment de rotació de la roda en un moviment lineal alternatiu del seguidor.
És com una lleva particular, el contorn és una circumferència en la qual l'eix de gir no coincideix amb l'eix de la circumferència, sent la carrera del seguidor el doble de la distància que hi ha entre el centre de la circumferència i l'eix de gir

4.6. Cigonyal
Eix amb colzes i contrapesos que, aplicant el principi del sistema de biela-manovella, transforma el moviment rectilini alternatiu en giratori o viceversa.
 |
| Imatge d'NASA a Wikimedia . domini públic |
• La monyeca serveix de seient als caps de les bieles.
• El braç és la peça d'unió entre l'eix i la monyeca. La seva longitud determina la cursa de la biela.

